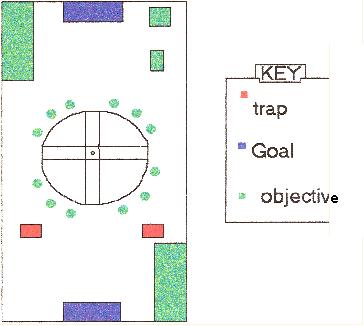
The Pit of Doom
Part I
1. You have 2.5 minutes
to gather as many columns as you can.
1. The robot must return to base before the time limit, or else
you lose all points.
2 . If the robot falls into the infamous "Pit of Doom"
you will lose all points earned so far.
3 . The gathered columns must be partly inside your objective
goal.
4 . You may not touch the robot during the round, or else you
will lose one of your energy cells. (Energy cells are not the
RCX batteries!)
Part II
1. You have a time limit of 5 minutes
to complete all the objectives.
1 . You may not touch the RCX during the round, or else you
will lose an energy cell. The only exception is when picking
up the scientist.
2 . If you lose both energy cells, you automatically end the
round. There is no point deduction.
3 . If you knock over or destroy an objective, you lose 25%
of points earned so far.
4 . If you trigger a trap, you will lose 25% of points earned
so far.
5 . Extra points will be added if you carry the barrel and/or
the scientist back to the objective box.
Regular Columns - 2 points each*12 columns=24 points possible
Golden Pillar - 10 points each*1 pillar=10 points possible
3 fuel cells - 2 points each*3 cells=6 points possible
Save the Scientist - 7.5 points
Bring the Scientist Home - 7.5 points
Barrel Drop from Tower - 8 points
Bring Barrel back to box - 2 points
Wheel Gate - 15 points
Trigger Fish - 10 points
Return Safely - 10 points
Total 100 possible points